
Merupakan Suatu media informasi seputaran dunia Elektro.Sharing and Searching Information.
Sunday, December 16, 2012
Sunday, December 9, 2012
Tentang Teknik Elektro UBB
Jurusan Teknik Elektro Universitas Bangka Belitung
Selamat datang di Teknik Elektro Universitas Bangka Belitung sebagai salah satu pusat studi keilmuan di Provinsi Kepulauan Bangka Belitung dalam mencetak mahasiswa elektro yang memiliki kompetensi keilmuan konversi energi dan elektronika terapan agar dapat bersaing guna di dalam kompetisi dunia global.
Sejarah Pendirian:
Pada awalnya, Universitas Bangka Belitung merupakan penggabungan dari 3 perguruan tinggi yang ada di Provinsi Kepulauan Bangka Belitung, yakni: Politeknik Manufaktur (Polman) Timah, Sekolah Tinggi Teknik Pahlawan (STTP) 12 dan Sekolah Tinggi Ilmu Pertanian (STIPER) Bangka. Hal ini juga yang menandai berdirinya salah satu Program Studi di Fakultas Teknik Universitas Bangka Belitung, yakni Program Studi Teknik Elektro, yang merupakan salah satu program studi termuda yang ada di lingkungan Universitas Bangka Belitung.
Menginjak tahun ke 5 berdirinya Program Studi Teknik Elektro, berbagai pembenahan telah dilakukan, diantaranya; peningkatan kualitas dan kapasitas dosen dan staf, melengkapi laboratorium dan ruang referensi sebagai penunjang kegiatan perkuliahan dan praktikum. Selain itu, berbagai penelitian dan pengabdian masyarakat juga dilakukan oleh civitas akademika Teknik Elektro Universitas Bangka Belitung.
Ijin Penyelenggaraan Jurusan:
SK Dikti No : 4911/D/T/K-II/2010
Pengelola Jurusan Teknik Elektro UBB:
Ketua Jurusan Teknik Elektro:
Ghiri Basuki Putra, S.T., M.T. (NP.308108019, ghiri-basuki@ubb.ac.id)
Sekretaris Jurusan Teknik Elektro:
Irwan Dinata, S.T., M.T. (NP.308510039, irwandinata@ubb.ac.id)
Kepala Laboratorium Jurusan Teknik Elektro:
Wahri Sunanda, S.T., M.Eng. (NP.308510038, wahrisunanda@ubb.ac.id)
Alamat Kontak :
Telephone : +6281322343192
website : te.ubb.ac.id
Email : te@ubb.ac.id, irwandinata@ubb.ac.id
Kampus Terpadu Balunijuk, Gedung Babel 1, Fakultas Teknik Universitas Bangka Belitung
Ds. Balunijuk, Kec. Merawang, Kab. Bangka
Prov. Kepulauan Bangka Belitung, Indonesia
Logo:
Arti dari Logo:
1. Warna:
Hijau menyatakan keuletan dalam mempelajari ilmu
Putih menyatakan kesucian pikiran dalam menyelenggarakan pendidikan
Kuning menyatakan kebersamaan dan kekeluargaan dalam civitas akademik yang ada dijurusan teknik elektro
Abu-abu menyatakan kesederhanaan dalam civitas akademik yang ada dijurusan teknik elektro
2. Gambar
Gambar IC menyatakan Teknologi Elektronika menjadi bagian penting dalam dunia Teknik Elektro
Gambar Sinyal menyatakan Teknologi Telekomunikasi menjadi bagian penting dalam dunia Teknik Elektro
Gambar Halilintar menyatakan Teknologi Power/Tegangan Tinggi menjadi bagian penting dalam dunia Teknik Elektro
Sumber : http://te.ubb.ac.id/profil/tentang-te-ubb/
By : Yudhie Murtie
Kurikulum yang diterapkan di Jurusan Teknik Elektro
Kurikulum 2010
Merupakan Kurikulum kedua setelah Kurikulum 2006 Jurusan Teknik Elektro yang dilaksanakan dari Tahun 2010 sampai sekarang, untuk angkatan 2008 dan seterusnya ,Kurikulum ini memiliki peminatan khusus seperti Elektronika Terapan dan Konversi Energi Listrik, kurikulum ini telah menyesuaikan dengan beberapa pengembangan dari pakar pendidikan dari beberapa penguruan tinggi dalam negeri dan pakar dunia kerja sehingga disesuaikan dengan permintaan pasar.
kurikulum 2010
Tracing Kur 2006 dan 2010
Merupakan Kurikulum kedua setelah Kurikulum 2006 Jurusan Teknik Elektro yang dilaksanakan dari Tahun 2010 sampai sekarang, untuk angkatan 2008 dan seterusnya ,Kurikulum ini memiliki peminatan khusus seperti Elektronika Terapan dan Konversi Energi Listrik, kurikulum ini telah menyesuaikan dengan beberapa pengembangan dari pakar pendidikan dari beberapa penguruan tinggi dalam negeri dan pakar dunia kerja sehingga disesuaikan dengan permintaan pasar.
kurikulum 2010
Tracing Kur 2006 dan 2010
By : Yudhie Murtie
Thursday, September 6, 2012
Hasil Studi Belajar Semester GENAP T.A. 2011-2012
Hasil Studi Belajar Semester GENAP T.A. 2011-2012
1. Angkatan 2011
Transkrip Angkatan 2011
2. Angkatan 2010
Transkrip Angkatan 2010
3. Angkatan 2009
Transkrip Angkatan 2009
4. Angkatan 2008
Transkrip Angkatan 2008
Terima Kasih. Admin » Jurusan Teknik Elektro UBB
copyright : » Jurusan Teknik Elektro UBB
1. Angkatan 2011
Transkrip Angkatan 2011
2. Angkatan 2010
Transkrip Angkatan 2010
3. Angkatan 2009
Transkrip Angkatan 2009
4. Angkatan 2008
Transkrip Angkatan 2008
Terima Kasih. Admin » Jurusan Teknik Elektro UBB
copyright : » Jurusan Teknik Elektro UBB
Monday, July 9, 2012
Pengumuman Hasil Jalur SNMPTN Ujian Tertulis tahun 2012
Pengumuman Hasil Jalur SNMPTN Ujian Tertulis tahun 2012
Pengumuman Calon Mahasiswa Baru UBB Jalur SNMPTN Ujian Tertulis tahun 2012
Bagi peserta jalur undangan SNMPTN 2012 yang diterima di UBB Silahkan download tatacara dan mekanisme Registrasi Ulang di link Berikut ini :
Mekanisme Registrasi Ulang untuk Mahasiswa Baru SNMPTN Jalur Ujian Tertulis tahun 2012
Download Surat Pernyataan Kesanggupan Membayar
Download Surat Pernyataan Tidak Menarik Biaya
Download Surat Pernyataan Mentaati Peraturan UBB
Pengumuman Calon Mahasiswa Baru UBB Jalur SNMPTN Ujian Tertulis tahun 2012
Bagi peserta jalur undangan SNMPTN 2012 yang diterima di UBB Silahkan download tatacara dan mekanisme Registrasi Ulang di link Berikut ini :
Mekanisme Registrasi Ulang untuk Mahasiswa Baru SNMPTN Jalur Ujian Tertulis tahun 2012
Download Surat Pernyataan Kesanggupan Membayar
Download Surat Pernyataan Tidak Menarik Biaya
Download Surat Pernyataan Mentaati Peraturan UBB
Mekanisme Registrasi Ulang untuk Mahasiswa Baru SNMPTN Jalur Ujian Tertulis tahun 2012

PENGUMUMAN
Nomor : 681/UN50/AK/2012
- Calon Mahasiswa wajib melunasi semua komponen biaya registrasi yang terdiri atas :
- a. Sumbangan Pembinaan Pendidikan (SPP) sebesar Rp. 600.000,00 (enam ratus ribu rupiah)
- b. Biaya Operasional Pendidikan (BOP), dengan rincian :
No
|
Program Studi
|
Jumlah SKS
|
Biaya Per SKS
|
Total BOP
Semester 1
|
| 1 | Akuntansi |
21
|
Rp. 40,000.-
|
Rp 840,000.-
|
| 2 | Manajemen |
21
|
Rp. 40,000.-
|
Rp 840,000.-
|
| 3 | Sosiologi |
18
|
Rp. 40,000.-
|
Rp 720,000 .-
|
| 4 | Ilmu Hukum |
18
|
Rp. 40,000.-
|
Rp 720,000.-
|
| 5 | Agroteknologi |
20
|
Rp. 50,000.-
|
Rp 1,000,000.-
|
| 6 | Biologi |
21
|
Rp. 50,000.-
|
Rp 1,050,000.-
|
| 7 | Agribisnis |
20
|
Rp. 50,000.-
|
Rp 1,000,000.-
|
| 8 | Manajemen Sumber Daya Perairan |
20
|
Rp. 50,000.-
|
Rp 1,000,000.-
|
| 9 | Teknik Mesin |
20
|
Rp. 50,000.-
|
Rp 1,000,000.-
|
| 10 | Teknik Elektro |
19
|
Rp. 50,000.-
|
Rp 950,000.-
|
| 11 | Teknik Sipil |
20
|
Rp. 50,000.-
|
Rp 1,000,000.-
|
| 12 | Teknik Tambang |
20
|
Rp. 50,000.-
|
Rp 1,000,000.-
|
- c. Sumbangan Peningkatan Mutu Akademik (SPMA)sesuai dengan ketentuan di bawah ini :
- SPMA 0 : Rp. 0,. (nol rupiah) bagi mahasiswa penerima beasiswa / beasiswa Bidik Misi;
- SPMA 1 : Rp. 1.500.000,00 (satu juta lima ratus ribu rupiah) untuk mahasiswa yang orang tuanya (bapak dan ibu) memiliki pendapatan antara Rp. 1.000.000,00 (satu juta rupiah) hingga Rp. 2.500.000,00 (dua juta lima ratus ribu rupiah);
- SPMA 2 : Rp. 3.000.000,00 (tiga juta rupiah) untuk mahasiswa yang orang tuanya (bapak dan ibu) memiliki pendapatan antara Rp. 2.500.000,00 (dua juta lima ratus ribu rupiah) hingga Rp. 5.000.000,00 (lima juta rupiah);
- SPMA 3 : Rp. 5.000.000,00 (lima juta rupiah) untuk mahasiswa yang orang tuanya (bapak dan ibu) memiliki pendapatan antara Rp. 5.000.000,00 (lima juta rupiah) hingga Rp. 7.500.000,00 (tujuh juta lima ratus ribu rupiah);
- SPMA 4 : Rp. 10.000.000,00 (sepuluh juta rupiah) untuk mahasiswa yang orang tuanya (bapak dan ibu) memiliki pendapatan lebih dari Rp. 7.500.000,00 (tujuh juta lima ratus ribu rupiah).
- d. Biaya lain-lain sebesar Rp. 510.000,00 (Lima ratus sepuluh ribu rupiah) untuk Dana Asuransi, Jaket Almamater, Orientasi Mahasiswa Baru dan Registrasi.
- Pembayaran SPP, BOP, SPMA dan Biaya lain-lain dilakukan melalui :
- Bank Sumsel Babel Cabang Pangkalpinang
- Nomor rekening : 1446300999
- Atas nama : Bend. Penerimaan UBB.
Panitia tidak melayani pembayaran dalam bentuk apapun di loket pendaftaran saat registrasi.
- Registrasi calon mahasiswa baru Universitas Bangka Belitung Tahun Akademik 2012/2013 dapat dilakukan langsung di Sekretariat PMB UBB dan secara online dilaman http://pmb.ubb.ac.id/ (bagi calon mahasiswa yang registrasi secara online wajib mengirimkan bukti pembayaran melalui Fax : 0717 – 421303 atau email ke: pmb@ubb.ac.id / info@ubb.ac.id, serta melapor ke Sekretariat PMB – UBB Tlp/Hp : 0717 – 422145 / 0821 8399 5595 untuk mendapatkan user name dan PIN ), pada :
hari : Senin s/d Jum’at
tanggal : 09 s/d 20 Juli 2012
pukul : 08.00 s/d 16.00 WIB
tempat : Biro Akademik, Kemahasiswaan dan Kerjasama Universitas Bangka Belitung (BAKK-UBB), Gedung Rektorat UBB Jl. Merdeka No. 4 Pangkalpinang.
dengan persyaratan :
- Sudah melakukan pembayaran pada butir 1 (satu);
- Menyerahkan Kartu Tanda Peserta SNMPTN Jalur Tertulis Tahun 2012;
- Menyerahkan fotocopi KTP/ SIM/ identitas diri lainnya yang masih berlaku sebanyak 2 (dua) lembar dan menunjukkan aslinya;
- Menyerahkan fotocopi akte kelahiran sebanyak 1 (satu) lembar dan menunjukkan aslinya;
- Menyerahkan Surat Tanda Kelulusan (STK) asli dan 1 (satu) lembar fotocopi atau Surat Tanda Tamat Belajar (STTB) sebanyak 2 (dua) lembar yang dilegalisir dan menunjukkan aslinya;
- Surat Penghasilan Orang Tua/Wali yang disahkan oleh Bendaharawan (untuk pegawai negeri, pegawai swasta, TNI dan POLRI) atau Kepala Desa/Lurah setempat untuk lainnya;
- Surat Pernyataan Siap Mentaati Peraturan Universitas Bangka Belitung;
- Surat Pernyataan untuk Tidak Menarik Biaya yang Sudah Dibayarkan;
- Menyerahkan surat keterangan tidak buta warna bagi calon mahasiswa Fakultas Pertanian, Perikanan dan Biologi dan Fakultas Teknik sebanyak 2 (dua) lembar (1 asli dan 1 fotocopi);
- Surat Keterangan Sehat dibuktikan dengan surat keterangan dari Dokter, masing-masing sebanyak 2 (dua) lembar (1 asli dan 1 fotocopi);
- Menyerahkan Surat Keterangan Catatan Kepolisian (SKCK) masing-masing sebanyak 2 (dua) lembar (1 asli dan 1 fotocopi);
- Menyerahkan pas foto berwarna terbaru ukuran 3×4, dan 2×3 masing-masing sebanyak 4 (empat) lembar;
- Memasukkan persyaratan point a, b, c, d, e, f, g, h, i, j, k, dan l di atas kedalam map :
- Warna hijau untuk Fakultas Pertanian, Perikanan dan Biologi
- Warna biru tua untuk Fakultas Teknik
- Warna kuning untuk Fakultas Ekonomi
- Warna orange untuk Fakultas Ilmu Sosial dan Ilmu Politik
(Diserahkan ke Sekretariat PMB UBB selambat – lambatnya tanggal 24 Agustus 2012)
- Membawa materai @ Rp. 6.000 sebanyak 2 (dua) lembar (sesuai dengan surat pernyataan yang dibuat);
- Menggunakan pakaian bebas pantas sopan (baju berkerah dan bersepatu).
Apabila sampai dengan tanggal 20 Juli 2012 pukul 16.00 WIB peserta tidak melaksanakan registrasi maka peserta dinyatakan melepaskan haknya sebagai mahasiswa Universitas Bangka Belitung.
Ditetapkan di : Pangkalpinang
Pada tanggal : 24 Mei 2012
Rektor,
Dto.
Prof. Dr. Bustami Rahman, M.Sc
copyright : http://snmptn.ubb.ac.id/pengumuman-persyaratan-registrasi-ulang-untuk-mahasiswa-baru-snmptn-jalur-ujian-tertulis-tahun-2012/
NAMA-NAMA MAHASISWA DAN DOSEN PEMBIMBING KERJA PRAKTEK TAHUN 2012-2013 JURUSAN TEKNIK ELEKTRO FAKULTAS TEKNIK UNIVERSITAS BANGKA BELITUNG
NAMA-NAMA MAHASISWA DAN DOSEN PEMBIMBING KERJA PRAKTEK
TAHUN 2012-2013 JURUSAN TEKNIK ELEKTRO FAKULTAS TEKNIK UNIVERSITAS
BANGKA BELITUNG
1. Mahasiswa Angkatan 2009 (Mahasiswa Baru Mengambil Pelaksanaan KP)
|
No
|
Nama |
Nim
|
Semester
|
Dosen Pembimbing KP | |
|
1.
|
Astanul Arifin |
1020911024
|
VI
|
Wahri Sunanda, S.T., M.Eng. | |
|
2.
|
Dedi Sukma |
1020911022
|
VI
|
||
|
3.
|
Doni Saisan |
1020911025
|
VI
|
||
|
4.
|
Jaka Rukmansyah |
1020911029
|
VI
|
||
|
5.
|
Merza Agusriarga |
1020911018
|
VI
|
||
|
6.
|
Ryan Hardiansyah |
1020911012
|
VI
|
||
|
7.
|
Susandri |
1020911026
|
VI
|
||
|
8.
|
Yogi Haryadi |
1020911002
|
VI
|
||
|
9.
|
Walkis Al Hafis |
1020911031
|
VI
|
||
|
10.
|
Diah Suprihatin |
10200911013
|
VI
|
Irwan Dinata, S.T., M.T. | |
|
11.
|
Fauzan |
1020911007
|
VI
|
||
| 12. | Ambyasmara |
1020911005
|
VI
|
||
| 13. | Faisal Alfarasyi |
1020911017
|
VI
|
Rika Favoria Gusa, S.T., M.Eng. | |
|
No
|
Nama |
Nim
|
Semester
|
Dosen Pembimbing KP | ||
|
1.
|
Chandra Sastra N |
1020811011
|
VIII
|
Ghiri Basuki Putra, S.T., M.T. | ||
|
2.
|
Elyas |
1020811002
|
VIII
|
|||
|
3.
|
Fega Erora |
1020811021
|
VIII
|
|||
|
4.
|
Ibadarudini |
1020811014
|
VIII
|
|||
|
5.
|
Ahdani Musawir |
1020711002
|
X
|
|||
|
6.
|
Henkie |
1020711004
|
X
|
|||
|
7.
|
Marwanto |
1020711005
|
X
|
|||
|
8.
|
Leo Adiwinata |
1020611001
|
XII
|
|||
|
9.
|
Jayanti |
1020811012
|
VIII
|
Irwan Dinata, S.T., M.T. | ||
|
10.
|
Dian Taykid |
1020611010
|
VIII
|
|||
|
11.
|
Jaka Erandi |
1020611013
|
VIII
|
|||
| 12. | Rici Octadistriawan |
1020811022
|
VIII
|
Rika Favoria Gusa, S.T., M.Eng. | ||
copyright : http://te.ubb.ac.id/
Software unik, aneh dan gokil
Wah,apa apaan neh.
Banting Stir dari dunia Dunia Elektro ke Software unik, aneh dan gokil.
Terus apalagi tuh Software unik, aneh dan gokil. Kok baru denger ya, hehe. Yups, software dibawah ini adalah software unik untuk menjahili temen kalian yang sedang asyik berada di depan komputer memelototi layar komputer dan sedang browser web atau situs. Sekarang aku akan ngasih ke kalian macem-macem software aneh, unik dan gokil untuk menjahili temen-temen kalian. Tak jamin kalo udah pasang ne software, bagi temen kalian yang phobia ama kejutan pasti akan berteriak. Kalo nggak teriak, ya paling misuh-misuh sendiri di depan komputer. Haha, baguslah tu zob, tapi inget yang kalian jahilin tuh kalo bisa temen yang bisa diajak bercanda. Jangan asal kalian jahili, ntar ketemu temen yang serius, kemudian kalian jahili, bisa marah tuh temen kalian jadinya. Tunggu apa lagi, langsung sedot aja software unik ini.
1. Software Avoid
Program ini ketika selesai install, maka akan selalu memindah tombol start ketika kalian ingin melakukan meng-kliknya. Bisa untuk bercanda dengan temen kalian dan untuk mengakali teman kalian juga. Mau download. Tinggal klik link download disamping. Download
Program ini ketika selesai install, maka akan selalu memindah tombol start ketika kalian ingin melakukan meng-kliknya. Bisa untuk bercanda dengan temen kalian dan untuk mengakali teman kalian juga. Mau download. Tinggal klik link download disamping. Download
2. Software Happy fred
Program ini akan menampilkan sosok kartun fred yang berjalan, berlari, berayun, teriak dan laen sebagainya di Dekstop PC kita. Lucu banget neh software. Dan untuk menutupnya kalian hanya membutuhkan trick aneh yaitu dengan mengarahkan kursor kita ke Pojok kiri atas - lalu klik close. Untuk download software, tinggal klik link download disamping. Download
Program ini akan menampilkan sosok kartun fred yang berjalan, berlari, berayun, teriak dan laen sebagainya di Dekstop PC kita. Lucu banget neh software. Dan untuk menutupnya kalian hanya membutuhkan trick aneh yaitu dengan mengarahkan kursor kita ke Pojok kiri atas - lalu klik close. Untuk download software, tinggal klik link download disamping. Download
3. Software Tikus
Ketika kalian selesai menginstall software ini, kemudian mengkliknya, maka tikus-tikus akan segera keluar memenuhi desktop kalian. Dan ketika program ini dijalankan, nggak terbayangin dah kalo kalian akan bisa menjerita NB bagi yang phobia dengan tikus. Tapi dilaen tempat, software ini bisa untuk hiburan di waktu sepi menyerang kalian yang sedang berada di depan komputer, entah ngeblog, chat dengan teman atau sedang ngaskus. Untuk mendownloadnya, kalian tinggal mengklik link download disamping. Download
Ketika kalian selesai menginstall software ini, kemudian mengkliknya, maka tikus-tikus akan segera keluar memenuhi desktop kalian. Dan ketika program ini dijalankan, nggak terbayangin dah kalo kalian akan bisa menjerita NB bagi yang phobia dengan tikus. Tapi dilaen tempat, software ini bisa untuk hiburan di waktu sepi menyerang kalian yang sedang berada di depan komputer, entah ngeblog, chat dengan teman atau sedang ngaskus. Untuk mendownloadnya, kalian tinggal mengklik link download disamping. Download
Semoga berhasil untuk kalian yang akan mengusili temen kalian. Hehe
Sorry nggak tak kasih screenshotnya soale belum sempet ngasih screenshotnya.
Good Luck !!!
Sunday, June 24, 2012
Robot Line Follower menggunakan USB
Robot
Line Follower Menggunakan USB
Mengenal
Robot Line Follower
Kit AVR Robotics
merupakan contoh penerapan
mikrokontroler AVR ATmega8535 pada robot line
folloer. Gambar berikut menampilkan
susunan kaki mikro AVR.

Gambar susunan kaki ATmega8535/16
Memrogram Robot Line
Follower
Ada

Gambar Contoh skema rangkaian sistem
minimum AVR (ST-8535 USB version)

Gambar Kit Mikrokontroler AVR (ST-8535 USB
version)
Anda perlu memperhatikan kemampuan driver aktuator jika ingin robot Anda memiliki kemampuan gerak yang tinggi, misalnya apakah cukup drier dengan beban maksimal 1A, 2 A atau 5A bahkan lebih, gambar berikut menampilkan contoh driver motor DC L293D dan L298 yang umum digunakan untuk mobile robot.
Anda perlu memperhatikan kemampuan driver aktuator jika ingin robot Anda memiliki kemampuan gerak yang tinggi, misalnya apakah cukup drier dengan beban maksimal 1A, 2 A atau 5A bahkan lebih, gambar berikut menampilkan contoh driver motor DC L293D dan L298 yang umum digunakan untuk mobile robot.


(a)
(b)
Gambar Driver Motor DC 1A(1) dan 2A (b)
Sebagai contoh pertama, cobalah Anda memprogram robot line follower, yaitu robot yang mengikuti garis menggunakan sensor garis berbasis Infra red. Sensor terpasang pada Port C.0 dan C.1, sedangkan driver motor DC dipasang pada Port B.0, B1. B.2 dan B.3. Blok diagram dari robot line follower sederhana dapat dilihat pada gambar di bawah:
Sebagai contoh pertama, cobalah Anda memprogram robot line follower, yaitu robot yang mengikuti garis menggunakan sensor garis berbasis Infra red. Sensor terpasang pada Port C.0 dan C.1, sedangkan driver motor DC dipasang pada Port B.0, B1. B.2 dan B.3. Blok diagram dari robot line follower sederhana dapat dilihat pada gambar di bawah:
 |
Gambar Blok diagram robot line
follower

Karena menggunakan motor DC sebagai aktuator, maka diperlukan driver motor DC. Berikut ini data cara menggerakkan motor DC pada kit driver motor DC seperti SPC Driver Motor DC :
Tabel 1. Penggunaan SPC DC Motor
Pin
|
Nama
|
Seting
|
Fungsi
|
S1
|
Run 1
|
Stop /Run
|
Untuk
menjalankan atau mematikan motor DC 1
Stop berlogika
1
Run berlogika 0
|
S2
|
Dir 1
|
CW/CCW
|
Untuk arah
putaran motor DC 1
CW berlogika 1
CCW berlogika 0
|
S3
|
Run 2
|
Sto/Run
|
Untuk
menjalankan atau mematikan motor DC 2
Stop berlogika
1
Run berlogika 0
|
S4
|
Dir 2
|
CW/CCW
|
Untuk arah
putaran motor DC 2
CW berlogika 1
CCW berlogika 0
|

Gambar Robot line follower yang sukses
dijalankan.
Saturday, June 23, 2012
Friday, June 22, 2012
Robot Obstacle Avoidance
Robot Obstacle Avoidance

1.1 Pendahuluan
Robot avoider adalah robot beroda atau berkaki yang diprogram untuk dapat
menghindar jika ada halangan, misalnya dinding. Robot avoider minimal
membutuhkan tiga buah sensor untuk mendeteksi penghalang yaitu sensor depan,
kanan dan kiri. Dalam hal ini sensor yang dipergunakan adalah sensor Infra Merah.
Robot membutuhkan sensor yang banyak karena untuk hasil pendeteksian
penghalang yang lebih baik. Hal ini dikarenakan keterbatasan sudut pancaran
sensor ( biasanya sekitar 15 derajat saja ). Sudut pantulan yang terlalu besar akan
menyebabkan hasil pembacaan sensor yang kurang akurat.
Sistem minimal robot avoider adalah
sebagai berikut :
- Mikrokontroller
- Dua buah sensor pendeteksi penghalang ( infra red )
- Dua buah motor dc sebagai penggerak roda

Gambar 1 Rangkain Robot Avoider
1.2 Penggerak Mobil Robot
Untuk dapat membuat mobil robot, kita menggunakan dua buah motor dc biasa, yaitu motor dc yang diberi gear, bisa juga servo motor tapi harganya cukup mahal, maka sebagai langkah awal kita pakai motor dc yang diberi gear. Motor dc yang dimaksud adalah motor dc yang terdapat pada CD ROOM, karena motor ini memiliki efesiensi yang tinggi.
Untuk dapat membuat sistim gear, kita gunakan sistim gear pada mobil mainan.

Gambar 2 Motor DC Dan Simtem Gearnya
1.3 Sensor Infra Merah
Kenapa
kita gunakan sensor jenis ini jawabnya harganya sangat murah cuman 5000
perak sepasang. Rangkaian sensor infra merah menggunakan foto
transistor sebagai penerima dan led infra merah sebagai pemancar. Foto
transistor yang digunakan adalah Foto transistor yang biasa di gunakan
untuk VCD, jadi kalau beli bilang sensor infra merah untuk VCD biasanya
toko elaktronik sudah ngerti.
Cara kerjanya : Untuk sensor penerima
Infra Merah tidak memerlukan rangkaian tambahan karena sensor ini sudah
ada rangkaian penerimanya sehingga outputnya sudah berbentuk digital
yaitu High dan Low.

Gambar 3 Sensor penerimaInfra Merah
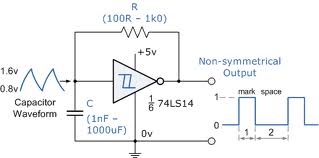
Dan
led Infra Merah digunakan sebagi pemancar. Karena infra merah bekerja
pada frekwensi 35kHZ maka harus di buatkan pemancar dengan frekwensi 35
kHZ, penulis sendiri membangunnya dari IC TTL 74LS14.
{kind=link}

Gambar 4 Rangkaian Pemancar IR
Dengan
ilustrasi : Foto transistor akan aktif apabila terkena cahaya dari led
infra merah. Antara Led dan foto transistor dipisahkan oleh jarak. Jauh
dekatnya jarak mempengaruhi besar intensitas cahaya yang diterima oleh
foto transistor. Apabila antara Led dan foto transistor tidak terhalang
oleh benda, maka foto transistor akan aktif,
sehingga menyebabkan output nya berlogik ‘1’ dan Led padam. Apabila
antara Led IR dan foto transistor terhalang oleh benda, foto transistor
akan tidak aktif, sehingga menyebabkan outputnya berlogik ‘0’ serta Led menyala.

Gambar 5 Cara Kerja Infra Merah
Untuk
membuat mobil robot ada beberapa hal yang harus diperhatikan. Hal
pertama adalah memilih tenaga penggeraknya, untuk ini bisa menggunakan
motor DC.
1.4 Membangun Dasar (Base) Robot Mobil
Membuat
dasar mobil robot sangat mudah, pertama - tama kita tentukan material
apa yang akan kita gunakan Plywood (triplek) atau menggunakan acrylic.
setalah itu anda tinggal membuat bidang kotak untuk menempatkan
rangkaian, kedua motor DC dan roda caster untuk roda caster penulis
menggunakan roda yang terdapat pada produk Rexona.

{kind=link}
Gambar 6 Skematik Body Mobil Robot
1.5 H-Bridge
Karena
keluaran dari IC 74HC86 tidak bisa langsung digunakan untuk
menggerakkan motor DC, maka harus diberi rangkaian tambahan yang bernama
H-BRIDGE yang terdiri dari 4 transistor, kita harus buat dua buah.

Gambar 7 Rangkaian H - Bridge
demikian
proyek pertama penulis membuat robot penghalang, dalam prakteknya robot
bisa berjalan dengan baik dalam artian saat sensor kanan terhalang maka
robot akan belok ke kiri, demikian juga saat sensor kiri yang terhalang
maka robot akan berbelok ke kanan. Sedangkan saat sensor depan yang
mendeteksi benda maka robot akan berjalan mundur untuk menghindari
halangan tersebut. bila ke dua sensor terhalang maka robot akan berhenti
berjalan, dan robot akan berjalan maju bila ke dua sensor tidak
terhalang.
Karena robot ini tidak menggunakan mikroprosesor yang dapat diprogram, maka robot akan berjalan dengan apa adanya.
Thursday, June 14, 2012
Wednesday, June 13, 2012
Rangkaian sensor suara robot KRCI

daftar komponen :
- R1,R3,R4 : 10K
- R2 : 1K
- R5 : VR220K
- C1 : 0,1 uF
- C2 : 4,7uF/16V
- IC1 : LM358
- MIC : Kondenser Microphone
[HD]Korea Fighting Robots Festival 2012 Under 2KG Quarter Final Fight (www.CoolRobots.Net)
Kontes Tarung robot,.seru buat ditonton.
Chaos™ Small Robot Platform (v. 2)
Video robot yang gak boleh dilewatkan Gan,..
tonton aja langsung ::Tuesday, June 12, 2012
Rangkaian Robot Visilife
Visilife

Dinamai Visilife yang merupakan singkatan dari very simple light follower. Sesuai namanya, robot mungil ini bergerak menuju sumber cahaya atau mengikuti arah sumber cahaya. Bahan yang digunakan untuk membuatnya sangat sedikit dan murah karena memang robot ini dirancang sebagai media pembelajaran robotika bagi pemula.
Visilife membutuhkan tegangan hanya 3V yang didapat dari 2 buah batere ukuran AA. Batere dipasang pada tempat batere yang sekaligus menjadi rangka utama robot. Dua motor DC yang digunakan adalah yang biasa dipakai pada tatakan (tray) penggerak DVD atau VCD. Harganya pun sangat murah.
Prinsip kerjanya seperti saklar cahaya. Sensor cahaya dioda-foto diletakkan dan diatur menyerupai antena pada serangga, jika ada cahaya terang yang mengenainya maka menyebabkan arus yang melalui motor mengalir sehingga motor berputar dan robot pun bergerak.
Mudah, kan? Tertarik untuk membuatnya? Para ayah bisa membuat bersama anak-anaknya, atau para kakak bisa membuat bersama adik-adiknya, kemudian bermain bersama :)
Silakan unduh di sini jang atau di sini boy panduannya. Ayo,
beli
buat sendiri robotmu!
sumber :: http://kampungrobot.net
RANGKAIAN AMPLIFIER GITAR 100W

Rangkaian Guitar Power Supply

Rangkaian Guitar Pre-Amp

Guitar Power Amplifier
Amplifier gitar selalu tantangan yang menarik. Kontrol nada, keuntungan dan karakteristik yang berlebihan sangat individual, dan kombinasi ideal bervariasi dari satu gitaris ke berikutnya, dan dari satu gitar ke yang berikutnya. Tidak ada amp yang memenuhi persyaratan setiap orang, dan penawaran ini diperkirakan tidak akan menjadi pengecualian.
Salah satu perbedaan utama bagaimanapun, adalah bahwa jika Anda membangun sendiri, Anda dapat memodifikasi hal-hal yang sesuai dengan kebutuhan Anda sendiri, eksperimentasi adalah kunci untuk sirkuit ini, yang disajikan dalam bentuk dasar, dengan harapan bahwa setiap pembangun akan mengubah hampir segalanya.
Amp adalah nilai di 100W menjadi beban Ohm 4, karena ini adalah khas amp "combo" tipe dengan dua speaker 8 Ohm secara paralel. Atau, Anda dapat menjalankan amp ke dalam kotak "quad" (4 x speaker 8 ohm secara paralel seri dan akan mendapatkan sekitar 60 Watt. Untuk, benar-benar petualang 2 kotak quad dan kepala amp akan memberikan 100W, tapi akan jauh lebih keras dari kembar. Ini adalah kombinasi umum untuk gitaris, tapi itu tidak membuat sulit bagi orang sehat untuk membawa segala sesuatu yang lain sampai ke tingkat yang sama
Salah satu perbedaan utama bagaimanapun, adalah bahwa jika Anda membangun sendiri, Anda dapat memodifikasi hal-hal yang sesuai dengan kebutuhan Anda sendiri, eksperimentasi adalah kunci untuk sirkuit ini, yang disajikan dalam bentuk dasar, dengan harapan bahwa setiap pembangun akan mengubah hampir segalanya.
Amp adalah nilai di 100W menjadi beban Ohm 4, karena ini adalah khas amp "combo" tipe dengan dua speaker 8 Ohm secara paralel. Atau, Anda dapat menjalankan amp ke dalam kotak "quad" (4 x speaker 8 ohm secara paralel seri dan akan mendapatkan sekitar 60 Watt. Untuk, benar-benar petualang 2 kotak quad dan kepala amp akan memberikan 100W, tapi akan jauh lebih keras dari kembar. Ini adalah kombinasi umum untuk gitaris, tapi itu tidak membuat sulit bagi orang sehat untuk membawa segala sesuatu yang lain sampai ke tingkat yang sama
Monday, June 11, 2012
Robot Jenius Terkecil di Dunia
Robovie mR2 adalah robot versi baru dari Robovie II dengan ukuran
yang lebih kecil dan ditujukan sebagai robot yang bisa menemani anda
yang sedang kesepian.

Kelebihan di Robo mR2 ini antara lain adanya iPod Touch/ iPhone
docking yang berarti robot ini bisa tersambung dan mengambil data dari
iPhone.
Sama seperti robot lainnya, Robovie mR2 bisa diajak bicara karena di
dalamnya sudah dilengkapi dengan CCD camera, 2 microphone dan speaker.
Robovie mR2 mempunyai tinggi hanya 30 cm dengan berat 2 kg sehingga cocok untuk selalu menemani anda di meja kerja.
Lihat videonya deh tetapi sejauh yang kami lihat, robot ini hanya
bisa diajak bicara, memberi informasi yang up-to-date dan berjalan.
Advanced Telecommunications Research Institute (ATR) sebagai perusahaan pembuat berencana akan menjual produk ini.
VIDEO
Saturday, June 9, 2012
Robot Explorer Hexapod [ Robot Laba laba ]

Pendahuluan
Pada proyek
robot kali ini, penulis memaparkan cara membuat robot berkaki 6 (hexapod)
menggunakan 3 buah sensor, yaitu 1 sensor jarak SRF04 (Sonar
Range
Blok
Rangkaian
Robot ini
bergerak berdasarkan informasi dari ketiga sensor jarak. Robot ini diharapkan dapat melakukan “eksplorasi” ke daerah yang dilaluinya, untuk memberikan informasi ke “pemiliknya” menggunakan kamera wireless misalnya, oleh karena itu robot ini dinamakan Explorer
Hexapod. Gambar
di bawah ini menampilkan blok rangkaian
yang akan dibuat:
 |
Gambar 1. Blok rangkaian
robot Explorer Hexapod
Bahan –bahan
Berikut ini
ialah bahan – bahan yang diperlukan, yang
paling penting tentunya ialah kerangka dari kaki hexapod ini, yang dapat Anda buat
sendiri atau membeli kit yang sudah jadi :
1.
2
buah servo motor HS311
2.
Body
dan kaki hexapod
(Dapat membeli kit kaki hexapod lengkap dengan 2 bh servo HS311)
3. Min.
System ATmega 8535, ATmega16 atau
Atmega32
4.
Driver
Motor DC 293D/ deKits SPC DC Motor
5. 1 sensor
jarak ultrasonic SRF 04 (jarak 3cm-3m)
6.
2
sensor jarak infrared SharpGP2D12(10cm -80cm)
7.
Tempat baterai 9V 2bh
Berikut ini ialah konstruksi
dari kaki hexapod standar,
yang digerakkan dari putaran motor servo continuous. Servo ini dikendalikan dari port B.0-3 melalui
Driver motor yaitu
kit DC motor Driver menggunakan IC L293D (dapat menggunakan juga kit dekits SPC DC Motor) atau jika ingin lebih
kuat lagi menggunakan IC H bridge L298. Perlu diingat, kaki servo ini ada 3 pin, cukup gunakan 2 kaki yang menggerakan
motor DC di dalam servo tersebut saja.
 |
Gambar 2. Susunan sisi kaki hexapod
Servo
HS311 merupakan servo dengan
torsi yang cukup besar untuk menggerakkan robot dengan beban maksimal
1.5kg.
Cara kerja
Pertama, kita lihat dulu
bagian sensor.
Sensor SRF04 digunakan untuk
mengetahui jarak depan robot, apakah ada penghalang atau tidak, yang mampu mendeteksi jarak dari 3cm hingga 3 meter. Sensor ini bekerja berdasarkan
prinsip gelombang
ultrasonic. Pencari jarak
ini bekerja dengan cara
memancarkan pulsa suara dengan kecepatan
suara (0.9 ft/milidetik) berfrekwensi 40 KHz.
Keluaran sensor ini dihubungkan
ke Port C.0 dan Port C.1, dan dengan nilai
trigger input sebesar 10 uS
pada pulsa TTL. Alasan mengapa
digunakan sensor ini, ialah karena
sensor jarak ini paling
banyak digunakan pada Kontes Robot Cerdas di Indonesia, sehingga pembaca pemula menjadi familiar. Anda dapat menambah sensor ini hingga 4 buah
untuk digunakan pada sisi kanan, kiri
dan belakang robot biar lebih akurat.

Gambar 3. Susunan kaki SRF04
Sedangkan 2 sensor infrared GP2D12 di
sisi samping kanan dan kiri
dapat mengukur jarak sejauh 10cm- 80cm dengan output
analog, sehingga dapat langsung dihubungkan ke port A.0 dan port A.1 dari mikrokontroler AVR tersebut. Karakteristik dari sensor ini
tidak linear, oleh karena itu idealnya
perlu digunakan look up
table untuk mengolah raw
data dari sensor tersebut.
Hasil pembacaan sensor-sensor jarak ini diolah
oleh mikrokontroler, untuk memutuskan gerakan yang akan
dilakukan apakah maju, mundur atau
belok. Dengan memutarnya servo, menyebabkan bagian kaki yang terhubung ke servo
bergerak bergantian
sehingga robot dapat berjalan.
Explorer.bas:
‘Program Demo Robot
Explorer Hexapod
‘By Mr. Widodo Budiharto
‘Univ. de Bourgogne
2007
‘deklarasi fungsi dan variabel
Declare Sub Initialize_ultrasonic()
Declare Function Ultrasonic_depan() As Integer
Dim Jarakdepan As
Integer
Dim Jaraksampingkanan As
Word
Dim Jaraksampingkiri As
Word
Dim W As Word
Config Portb
= Output
Config Portd
= Input
Config Portc
= Output
Config Adc
= Single , Prescaler = Auto
, Reference = Avcc
'konfigurasi ADC
Start Adc
Call Initialize_ultrasonic ‘panggil fungsi
Do
‘baca SRF04 untuk jarak depan
…
Print "jarak sampingkiri" ; Jaraksampingkiri
‘Demo jika ada halangan, maka belok kiri
If Jarakdepan
> 40 Then
Portb
= 8 'maju
Wait 2 ‘delay
Else if jarak depan
<40 and jaraksampingkanan >150 then
Portb
= 0 'belok kiri
Wait 2
End If
End
Function Ultrasonic_depan() As Integer
… ' set initial state pin trigger
… ' buat
pulsa 5us @ 4
MHz
… ' ukur return pulse
End Function
Sub Initialize_ultrasonic ‘inisialisasi sensor
ultrasonik
…
End Sub
Gambar berikut merupakan hasil yang sudah jadi yang dapat berjalan dengan cukup cepat
dan kuat karena menggunakan servo torsi tinggi dari Hitec.


A. B.
Gambar 4. Robot in action a). Tampak samping b).
Tampak depan
Pengembangan Selanjutnya
Untuk keperluan
riset atau hobi, Anda dapat
menambahkan kemampuan Artificial
Intelligent menggunakan Fuzzy Logic, Algoritma Genetic atau Neural
Network, agar robot ini menjadi
robot yang cerdas.
Silahkan baca artikel selanjutnya mengenai Neural Network di majalah kesayangan Anda ini.
copyright :: http://www.toko-elektronika.com/tutorial/explorer.html
Subscribe to:
Comments (Atom)